感知机是一种二元线性分类器,最初由Frank Rosenblatt在1957年提出。它是一种基本的神经网络模型,也是深度学习的起源之一。
感知机的工作原理是将输入向量与一组权重向量进行内积运算,然后将结果通过一个阈值函数(如阶跃函数)进行判断分类。这个阈值函数将内积的结果映射到一个二元输出(1或0),表示输入向量所属的类别。感知机的训练过程就是通过不断调整权重向量,使得分类器能够正确地分类所有的训练样本。
感知机的优点是简单、易于实现,可以处理大规模数据集,并且具有在线学习的能力,即可以在不断接收新的训练样本的情况下更新模型。缺点是只能解决线性可分问题,对于非线性问题无法处理,因此通常需要结合其他方法或模型来解决复杂问题。
如下图所示,输入向量$\vec{x}=(x1,x2)$,权重向量$\vec{w}=(w1,w2)$,输出向量$\vec{y}$
基于感知机的定义,上图的分类函数如下:
其中权重向量$\vec{w}$表达输入信号的重要程度,权重越大,说明权重所对应的信号在分类函数中的占比越大
逻辑电位
与门(AND Gate)
与门,在给定的分类函数中,当且仅当所有信号都达标时,整个分类函数的结果就是1,否则函数结果是0。与门的真值表如下:
| x1 | x2 | y |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 0 |
| 0 | 1 | 0 |
| 1 | 1 | 1 |
假定信号向量$\vec{x}$元素的取值范围在集合$[0,1]$中,那么只需要找到一组$w1,w2,\theta$满足上述真值表即可。当然,满足条件的集合有无群多个,我们随便选取一个,如{0.5, 0.5, 0.7}来实现一个与门感知机
|
0 0 0 1
或门(OR Gate)
或门,在给定的分类函数中,只要任意一个或者多个信号达标时,函数结果是1,否则是0。或门真值表如下:
| x1 | x2 | y |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 1 |
| 0 | 1 | 1 |
| 1 | 1 | 1 |
同样,我们选一组集合{0.5, 0.5, 0.3}实现一个或门感知机
|
0 1 1 1
与非门(NAND Gate)
与非门是与门取非
| x1 | x2 | y |
|---|---|---|
| 0 | 0 | 1 |
| 1 | 0 | 1 |
| 0 | 1 | 1 |
| 1 | 1 | 0 |
我们选一组集合{-0.5, -0.5, 0.7}实现一个或门感知机
|
1 1 1 0
权重和偏置
对感知器分类函数做如下转换:$b=-\theta$,那么新的分类函数如下:
其中向量$\vec{w}$即为权重,表示对应信号量的权重;b为偏置,表示神经元(分类函数)被激活(输出1)的难易程度
感知机的局限性
异或门(XOR Gate)
异或门,当且仅当两个信号不同时,函数结果是1,否则是0。异或门真值表如下:
| x1 | x2 | y |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 1 |
| 0 | 1 | 1 |
| 1 | 1 | 0 |
我们发现,很难用感知机来实现异或门,因为感知机只能实现线性可分问题,而异或门是线性不可分的。如下图所示,感知机无法将两类数据分开,因为它们不是线性可分的。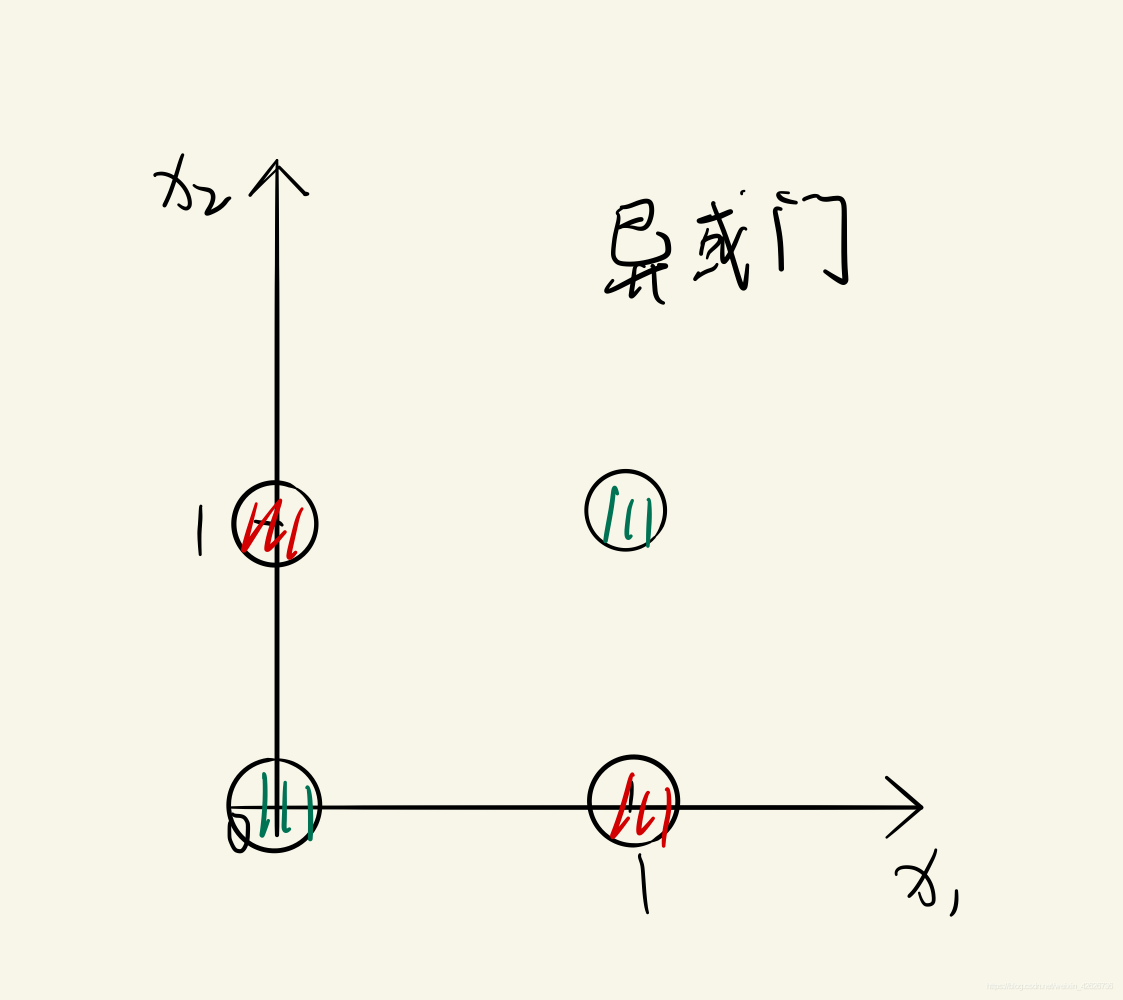
要对异或门进行分类,需要引入非线性函数,如下图所示,我们将感知机的输出作为非线性函数的输入,这样就可以实现异或门的分类了。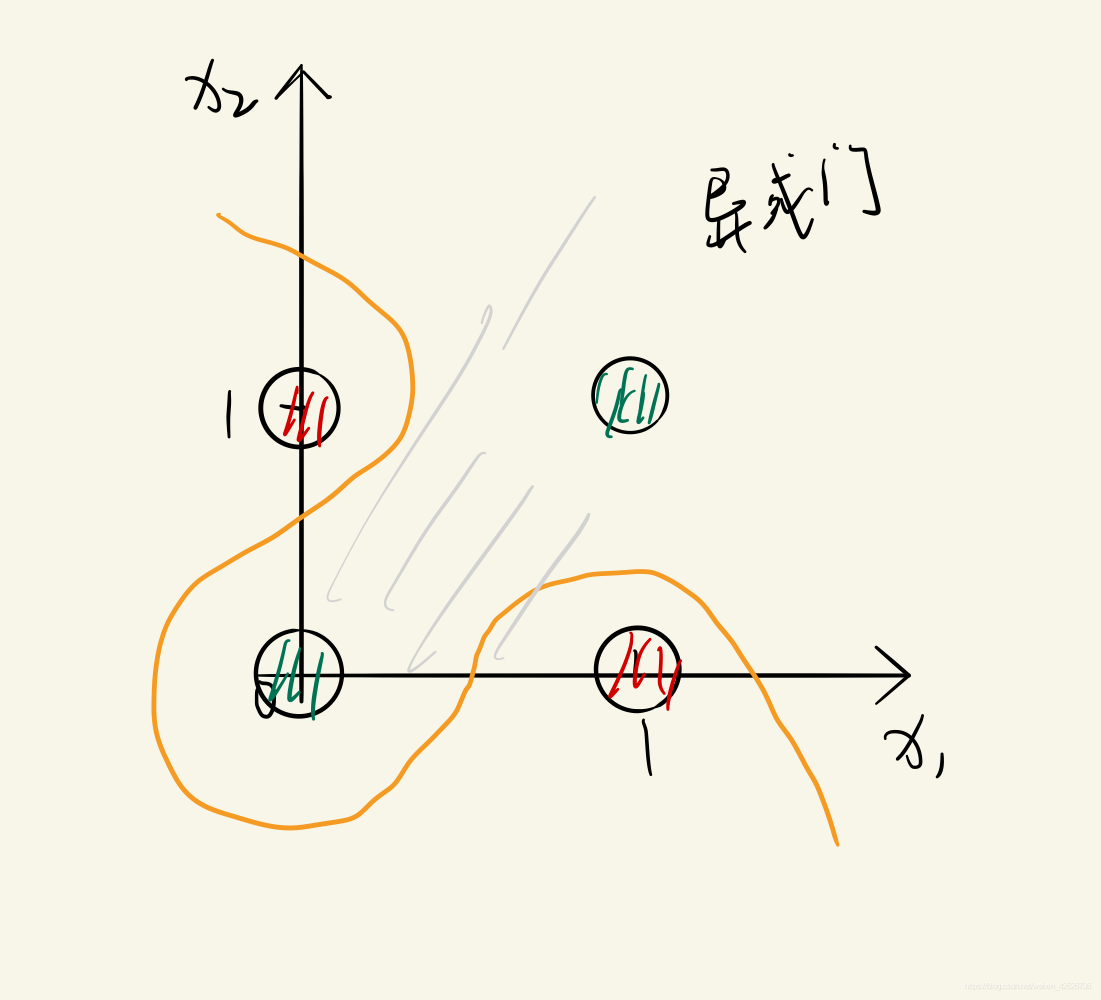
多层感知机
多层感知机,是指在感知机的基础上,增加一层或多层非线性函数,如下图所示,我们将感知机的输出作为非线性函数的输入,这样就可以实现异或门的分类了。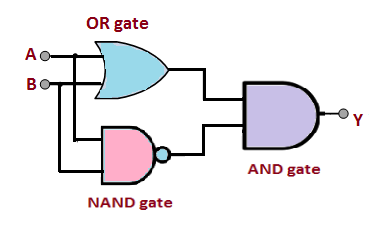
通过多层感知机实现异或门
|
0 1 1 0
异或门是一个多层感知机,它是由与门、或门、与非门组合而成的。这里我们使用了与门、或门、与非门三个门电路,如下图所示。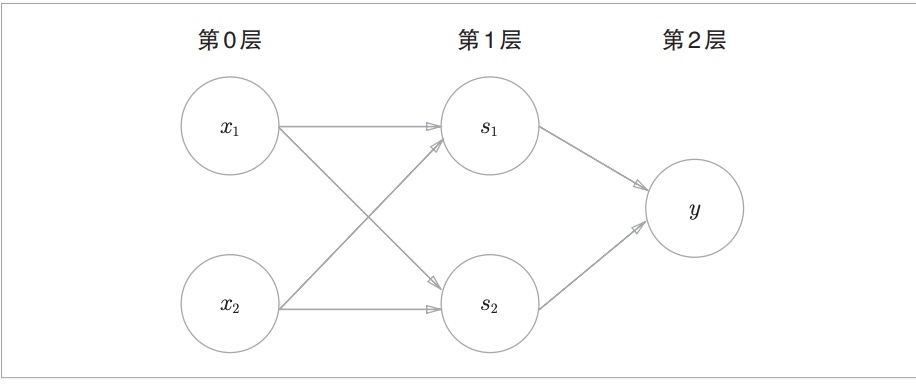
第0层有两个神经元接收输入信号,第一层接收第0层的输出信号作为输入信号进行计算,并输出最终结果y